Controlling moving light pan with Myo (joy and problems)
-
Dear collective wisdom,
I am trying to control a moving light with Myo through a max patch that transforms a dancer movement into light movement. When the dancer starts rotating th light does it too. Everything is fine but I have a problem that also happens with a infinite rotation potentiometer. When the dancer slowly turns Myo orientation values go from 0 to 127 (a full tour on himself) and the light does the same. But if the dancer wants to go on rotating in the same directions values go back to 0 and the light.... also comes back quickly to the initial position.Any idea on how to solve this?Thanks -
you are mapping an up ramp, but no down ramp.
You need to map range X to the Up (0 to 127) and range Y to Down(127 to 0)Setup so that X and Y ranges alternate at the thresholds. -
@DusX - this problem has also been confusing me for a while now. with your advice, I think I can build a solution. Thanks Ryan.
John -
I found a solution, using Ryan's ramping idea - this gives a particular outcome that is smooth, but half the time, the output doesn't correlate with the input.is there a way of patching something so that an increasing input gives an increasing output, ignoring the jump back to zero, and a decreasing input gives a decreasing output, ignoring the jump back to 127? I can't get my head around it. ;)John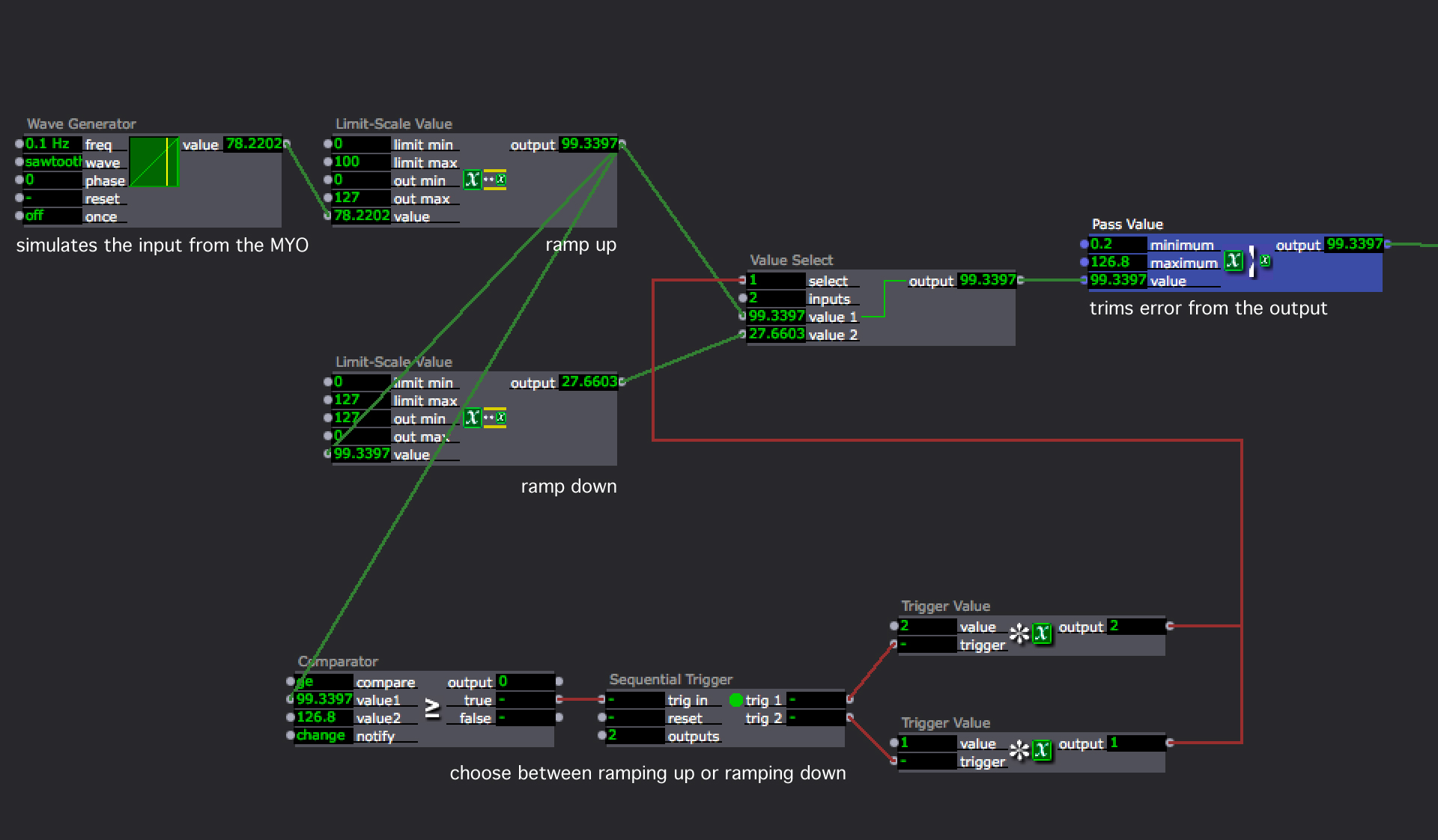
-
Armando,
I cannot understand exactly where is your problem? Can you give what is the Myo output and what do you need for numbers?Jacques -
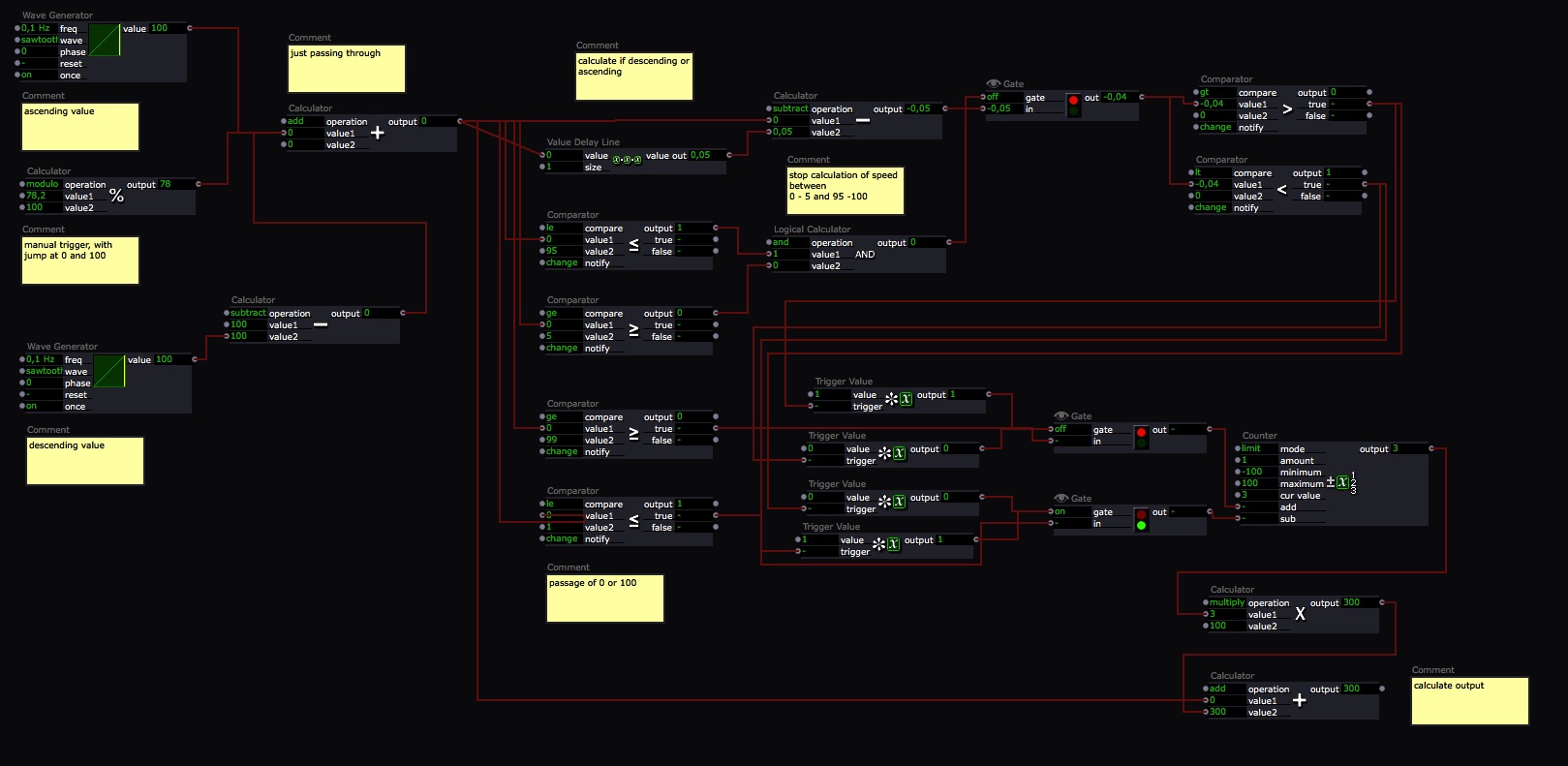
I think I understand your problem. The problem is you have to increment the output with 100 when you pass 0 in positive way and decrease it by 100 when you pass 0 in negative way to avoid the gap, so you need to know the instant speed.I made a quick (working) proposition, it would be much easier in Python :-) less in javascript because you cannot easily manage real time inside the script.Here is the patch and the screen capture.PS that's the reason because I use encoders instead of infinite potentiometer, you know instantly in which side you are rotating.Hope that helps,Jacques -
Thanks a lot folks. I think that Jacques has a solution but I don't have the light any more now. As soon as I have it again. What encoders are you referring too Jacques?
-
I've been working on how to solve this problem and have come up with something I think may be useful to share. The Macro in here converts OSC from the MYO into joystick control that outputs a constant signal if the MYO is moving, but nothing if it is still. I've included a counter to be able to convert this signal back into numerical data, if that is necessary. It gives a nice, organic ramping to the data and can cope with the data thresholds.
John
John Collingswood
taikabox.com
2013 MBPR 2.3GHZ i7 OSX11.7.4 16GB
& 2019 MBPT 2.6GHZ i7 OSX12.3 16GB -
Armando Menicacci
www.studiosit.ca
www.armandomenicacci.netMacbook pro 16 inches 2022 64 GB RAM, M1 MAX. OS 14 Sonoma
-
@Armando - Yes, yes, yes (i uploaded the patch when that feature of the new forum wasn't working)
here it is, let me know if it works for you,
all the best,
john